





MOTOSİKLETTE DENGE VE YÖNLENDİRME
Denge:Düz bir hatta, karşı rüzgarlar yokken motor ve sürücünün birleşik yer çekimi kuvvet merkezini ön ve arka tekerin yerle temas ettiği yüzeyleri birleştiren çizgiye(wheelbase) dik tutulmasıdır. Motor yatmaya başlarsa bunu düzeltmenin iki yolu vardır. Bu tekniklerle yer çekim merkezi bileşik noktasının altındaki lastiklerin yerle temas yüzeylerini birleştiren çizgi üzerine tekrar getiririz:
1) Yer çekim merkezini yeni temas yüzeylerini birleştiren çizgi üzerine çekmek.
2) Temas yüzeylerini birleştiren çizgiyi yeni yer çekim merkezi noktasının altına getirmek.
Lastik temas hatlarını birleştiren çizgi üzerine bedeninizi eğerek yer çekim merkezinizi tekrar bu çizgi üzerinize getirirsiniz. Bu buzlu bir yolda yürürken kayan bir insanın bedenini üst tarafını gayri ihtiyari kayma yönünün tersine eğmesi ile aynı prensibe dayanır.
İkinci usul yani çizgiyi yeni yer çekim merkezinizin altına getirmektir. Buda motoru yönelterek yapılır. Motor sola yatmaya başladı diyelim bu durumda yer çekim merkezi temas alanlarını birleştiren çizginin soluna kaçacaktır. Dengeyi düzeltmek gidonu temas yüzeylerini birleştiren çizgisinin soluna çevirerek yapılır, motorun önü sola gider ve motor sola kaçar. Yer çekim merkezi ile yer temas yüzeylerini birleştiren çizgi üst üste geldiğinde ise denge tekrar sağlanmış olur. Buradaki dengelem unsurlarının etkisi sürate paralel olarak artar veya azalır. Yavaş süratlerde motoru sağa sola saptırmak daha kolay yüksek süratlerde atıl kütle devinimi daha fazla olacağından daha zordur ve daha fazla kuvvet uygulanması gerekir. Atıl kütle devinimi hem kütle ve hem de hızla bağımlıdır. Kütle büyüdükçe oda büyür veya kütle aynı kaldığı halde hız artarsa onunda etkisi büyür. Bu yüzden hafif motorların yönlendirilmesi ve dengelenmesi daha kolaydır.
Ön tekerin yere temas yüzeyi motorun dengesinde önemlidir. Bu alan arttıkça motorun dengesi de artar. Trail denilen bu alan şekilde gösterilmiştir. Ancak bu yüzeyin büyümesi yönlendirmeyi yavaşlatacaktır.
Şimdi bu şu demektir:
Motorun gidonuna herhangi bir güç uygulamasanız bile hareket halindeki bir motoru sola yatırdığınızda ön teker kendiliğinden sola dönecektir. Bu dönme işi süratiniz ne kadar fazla ise o kadar çabuk olacaktır ve üzerindeki güçte o kadar artacaktır. Bu fiziksel olgu yelkenli teknelerde kullanılan rüzgar gülünün rüzgarın sürati arttıkça daha kararlı bir şekilde rüzgarın içine dönmesi ile aynı prensiptir.
Jiroskopik güçler dediğimiz tüm motordaki dönen parçaların merkezden dışa olan açısal ivmeleri motorda oluşan her yatma hareketine karşı bir direnç gösterirler. Bu dönen parçaların hızları arttıkça (sadece tekerlekler değil, şaft, zincir dişlileri, rulmanlar vs) bunların açısal ivmeleri de artacağı için motorun yatma eğilimine karşı dirençleri de artacaktır. Motorun hızı arttıkça da bu parçaların hızları artar dolayısıyla yüksek hızlarda motoru yatırmak için daha fazla ve daha sürekli güç uygulanması gerekir.
Jiroskopik(denge çarkına ait) devinim olarak bu bilince yansıyan olay daha düşük süratlerde de (yürüme hızlarında) vardır. Zayıf bir etki olmasına karşın motor yatmaya başladığında gidonu düzeltmeye çalışır. Bu olgu bir düzlemde dönmeye çalışan denge çarkının gücünü denge çarkının aksına 90 derece bir düzlemde(offset) döndürmeye çalışır. Ama yürüme hızlarında bu etki sola yatan bir motoru düzeltmeye yetmez. Böylece sola yatmaya meyil eden bir motoru gidonu çeyrek sağa çevirerek dengeleriz. Düşük süratlerde motoru dengede tutmak için yaptığımız gayri ihtiyari gidonu sağa sola çevirme hareketi aslında bu güce destek olmak içindir. Yani sola yada sağa yatmaya meyil eden motoru bu süratlerde devinim yetersiz kaldığı için biz gidonu ters yönde çevirerek dengeleriz.
Özetlersek:
. Dengelemede atıl kütle etkisi hız arttıkça artar..
. Lastik yerle temas alanının (yönlendirme geometrisi) hız arttıkça dengeleme etkisi artar.
. Jiroskopi dediğimiz denge çarkının dengeleme etkisi hız arttıkça artar.
Not: Tabi bu madalyonun diğer yüzü de motorun hızının arttıkça dönüş yönlendirmesinin zorlaşmasıdır.
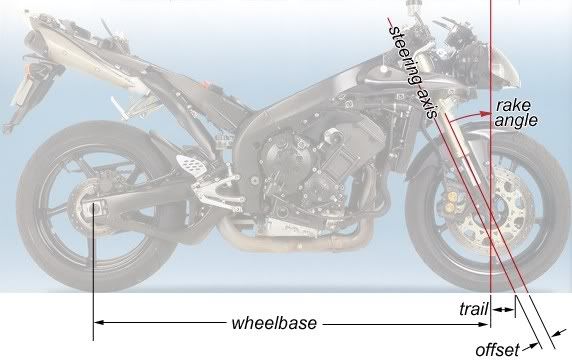
Wheelbase: Aks açıklığı, Steeringaxis: Yönlendirme ekseni
Dönüş yönlendirmesi:
Her dönüş motor üzerinde motoru dönüşün dış yönüne yatmaya yönelten merkezkaç kuvveti oluşturur. Bu merkezkaç kuvvetini dengelemek için yer çekim kuvvet merkezinin dönüş içine karşı denge unsuru olarak taşınması gerekir. Sola dönüş sola yatış ister, sağa dönüş sağa yatış. Bu yavaş hızlı tüm yürüme hızı üzerindeki sürüşler için geçerlidir.
Bunu nasıl gerçekleştiririz?
Amaç düz sürüşten dönüşte dengeye geçmektir. Yatmak demek birleşik çekim noktanızı dikey altınızdaki temas çizgisinde kaçırmaktır. Örneğin düz giderken sol gidon elciğini ileriye itersek ön tekerin önü sağa bakar. Bu durumda sürücünün ve motorun ağırlığı yerdeki dayanaklarının(lastik temas yüzeylerinin) solundadır. Ağırlık solda olunca motor sola yatar. İşte kontra tekniği dediğimiz, aslında ön tekerin önünü döndürdüğünüz yönün aksine döndürmektir. Bu yüzden sola dönüş için ağırlıkların sola kayması için sol elcik ileri itilerek ön tekerin burunu sağa baktırılır. İşin olağan dışı görünmesinin altında yatan yalın gerçek budur.
Elciğe uyguladığınız baskı ne kadar sertse dönüş o kadar hızlı olur ve elciği ne kadar uzun iterseniz yatış açısı da o kadar fazla olur.
İstediğiniz dönüş çapına ulaştığınızda elcik üzerindeki kontra baskınızı azaltın. Motosiklet dönüş geometrisi, lastik profili ve diğer faktörler motoru dönüşte dengeli tutacaklardır. Bazı faktörlerin var olmasıyla dönüşte motorun dengesinin sağlanması için elciğe kontra basılması gerekmeyebilir. Denge bir kere sağlandıktan sonra ön teker dönüşün belli derecelerine kadar dönecektir.
Ön tekerin önünün dönüşün tersine dönmesi sıfır hıza kadar esas olarak geçerlidir. Yüksek hızlarda dönüş açısı kendini ayarlamaya meyillidir. Düşük hızlarda dar dönüşlerde kendini ayarlama olmayabilir. Bu yüzden bir kere dönüş başladığında dönüşü devam ettirmek için elciklere baskı uygulamaya devam etmek durumundasınız. Dönüş esnasında hat değiştirmek isterseniz dönüş çizgisini daraltmak için iç elciğe baskıyı artırarak, açmak isterseniz dış elciğe kontra basarak yapabilirsiniz.
Bir motoru diğer bir motordan daha iyi dönüş yapabilen bir motor yapan sebep nedir?
Kafa açısı(Rake Angle) resimde de görüldüğü gibi kafa takımının tüplerinin aks merkezinden geçen yere dikey doğruyla yaptığı açıdır. Kafa açısı büyüdükçe ön tekerlek motordan uzaklaşacaktır.
Lastiğin yere basma mesafesi(Trail) kafa açısı büyüdükçe yada sürücü ağırlığını öne kaydırdıkça artacaktır. Aks merkezinden yere dik doğrultuda geçen çizginin yerdeki temas noktası ile kafa takımı tüplerinin yerdeki temas noktası arasında kalan mesafedir.
Kafa açısı büyüdükçe lastik yere temas mesafesi büyür ve motorun düz yol dengesi artar, viraj dönüş kabiliyeti düşer. Tersi durumda; kafa açısı küçüldükçe ön teker motora yaklaşır, lastik yerle temas mesafesi azalır ve motorun viraj dönüş kabiliyeti artar ama düz yolda ki dengesi azalır.
Gezi Tipi Motorlarda:

Kafa açısı(Rake-Kaster): 32 derece
Yer temas mesafesi(Trail): 15.2cm
Aks açıklığı.: 171cm
Sonuç: Bu motor düz yolda daha dengeli ama dar açılı dönüşlerde nispeten daha dengesiz olacaktır. Uzun aks mesafesi de düz yol sürüş dengesi için artı katkı yapacaktır. Turing, cruiser tipi motorlar böyledir.
Spor Motorlarda:

Kafa açısı: 24 derece
Lastik yere temas mesafesi.: 9.5cm
Aks açıklığı(Wheelbase): 139cm
Sonuç: Bu motor bir turing den yada cruiser den çok daha çabuk ve keskin açıyla dönüş yapabilecektir. Ama bir cruiser yada turing kadar düz yolda dengeli olmayacaktır. Kısa aks açıklığı da bu yönde etki yapacaktır. İyi dönüş ama buna karşın nispeten kötü düz yol dengesi.
